Kinematic
Prior part design (or after for assembly), we may want to see how what we are making should behave. We use then a Kinematic, using the current engineering conventions. In the same spirit as for the primitives, the solvekin function solves the joints constraints.
from madcad import *
# We define the solids, they intrinsically have nothing particular
base = Solid()
s1 = Solid()
s2 = Solid()
s3 = Solid()
s4 = Solid()
s5 = Solid()
wrist = Solid(name='wrist') # give it a fancy name
# The joints defines the kinematic.
# This is a 6 DoF (degrees of freedom) robot arm
csts = [
Pivot(base, s1, (O, Z)), # pivot using axis (O,Z) both in solid base and solid 1
Pivot(s1, s2, (vec3(0, 0, 1), X), (O, X)), # pivot using different axis coordinates in each solid
Pivot(s2, s3, (vec3(0, 0, 2), X), (O, X)),
Pivot(s3, s4, (vec3(0, 0, 1), Z), (vec3(0, 0, -1), Z)),
Pivot(s4, s5, (O, X)),
Pivot(s5, wrist, (vec3(0, 0, 0.5), Z), (O, Z)),
]
# The kinematic is created with some fixed solids (they interact but they do not move)
kin = Kinematic(csts, fixed=[base])
# Solve the current position (not necessary if just need a display)
solvekin(csts)
show([kin])
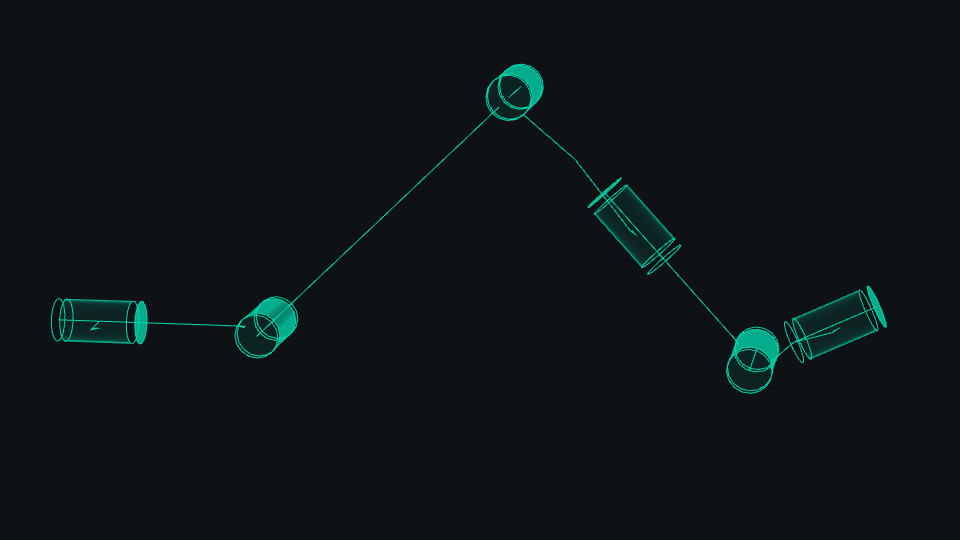
Kinematics are displayable as interactive objects the user can move. They also are useful to compute force distributions during the movements or movement trajectories or kinematic cycles …